
During my time at Iguana Robotics, Inc. I had the opportunity to help design and build a few new robot platforms:
Marlyn
Marilyn - The first robot I helped design at Iguana during my internship. I did about half of the mechanical design on the first iteration of Marilyn. This robot is unique in that it has an actuated toe. The legs are cable-driven by 2 hobby servos per joint with an inline spring. This lets us control the stiffness of the joint dynamically.
TomCat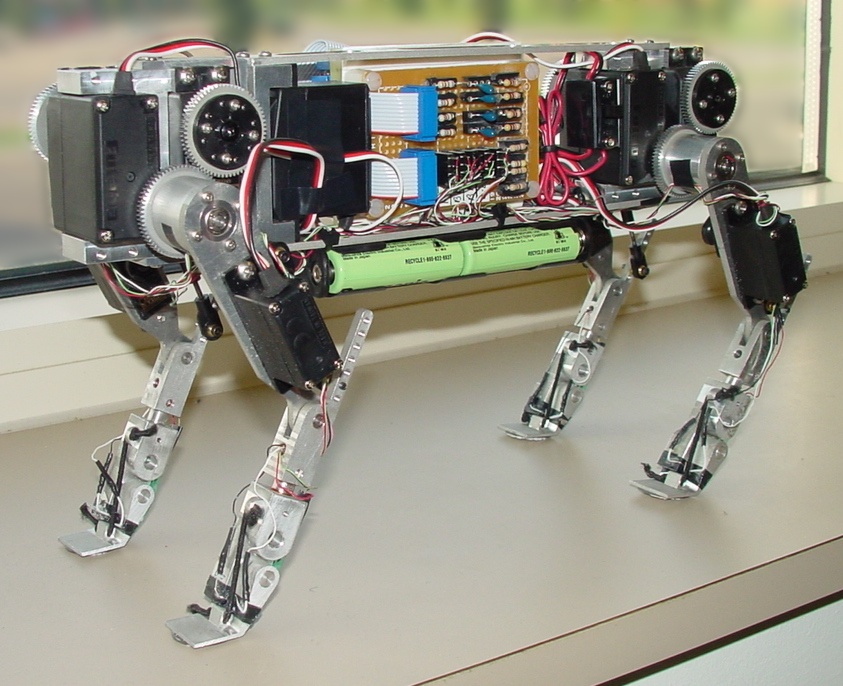
TomCat - The second robot I helped design during my internship. I had a much larger role in designing this robot than Marilyn. After I came back to Iguana to work full time, I extended this robot with another motor in the torso. This robot has force sensing resistors on each foot to be able to adjust it's posture for even weight distribution.
Snappy
Snappy - Although I did not design this robot, I designed and built the sensor and power system. This included a rack mount box with the motor controllers and power supplies. It also included an intermediate sensor consolidation circuit board that fits discretely inside the torso of Snappy.